
Frank Denneman is a Chief Technologist in the Office of CTO of the Cloud Platform BU at VMware. He is the author of multiple books including “vSphere 6.5 Host Technical Deep Dive” and the “vSphere Clustering Technical Deep Dive” series.
Reviewing the physical layers helps to understand the behavior of the CPU scheduler of the VMkernel. This helps to select a physical configuration that is optimized for performance. This part covers the Intel Xeon microarchitecture and zooms in on the Uncore. Primarily focusing on Uncore frequency management and QPI design decisions.
There
a are a lot of different names used for something that is apparently
the same thing. Let’s review the terminology of the Physical CPU
and the NUMA architecture. The CPU package is the device you hold in
your hand, it contains the CPU die and is installed in the CPU socket
on the motherboard. The CPU die contains the CPU cores and the system
agent. A core is an independent execution unit and can present two
virtual cores to run simultaneous multithreading (SMT). Intel
proprietary SMT implementation is called Hyper-Threading (HT). Both
SMT threads share the components such as cache layers and access to
the scalable ring on-die Interconnect for I/O
operations.

Interesting
entomology; The word “die” is the singular of dice. Elements such
as processing units are produced on a large round silicon wafer. The
wafer is cut “diced” into many pieces. Each of these pieces is
called a die.
In
the following scenario, the system contains two CPUs, Intel 2630 v4,
each containing 10 cores (20 HT threads). The Intel 2630 v4 is based
on the Broadwell microarchitecture and contains 4 memory channels,
with a maximum of 3 DIMMS per channel. Each channel is filled with a
single 16 GB DDR4 RAM DIMM. 64 GB memory is available per CPU with a
total of 128 GB in the system. The system reports two NUMA Nodes,
each NUMA nodes, sometimes called NUMA domain, contains 10 cores and
64 GB.

The CPU can access both its local memory and the memory controlled by the other CPUs in the system. Memory capacity managed by other CPUs are considered remote memory and is accessed through the QPI (Part 1). The allocation of memory to a virtual machine is handled by the CPU and NUMA schedulers of the ESXi kernel. The goal of the NUMA scheduler is to maximize local memory access and attempts to distribute the workload as efficient as possible. This depends on the virtual machine CPU and memory configuration and the physical core count and memory configuration. A more detailed look into the behavior of the ESXi CPU and NUMA scheduler is done in part 5, how to size and configure your virtual machines is discussed in part 6. This part focusses on the low-level configuration of a modern dual-CPU socket system. ESXtop reports 130961 MB (PMEM /MB) and displays the NUMA nodes with its local memory count.

Each
core can address up to 128 GB of memory, as described earlier the
NUMA scheduler of the ESXI kernel attempts to place and distribute
vCPU as optimal as possible, allocating as much local memory to the
CPU workload that is available. When the number of VCPUs of a virtual
machine exceeds the core count of a physical CPU, the ESXi server
distributes the vCPU even across the minimal number of physical
CPUs.It also exposes the physical NUMA layout to the virtual machine
operating system, allowing the NUMA-aware operating system and / or
application to schedule their processes as optimal as possible. To
ensure this all occurs, verify if the BIOS is configured correctly
and that the setting NUMA = enabled or Node Interleaving is disabled.
In this example a 12 vCPU VM is running on the dual Intel 2630 v4
system, each containing 10 cores. CoreInfo
informs us that 6 vCPUs are running on NUMA node 0 and 6 vCPUs are
running on NUMA node 1.

There seems to be a lot of confusion about this BIOS setting, I receive lots of questions on whether to enable or disable Node interleaving. I guess the term “enable” make people think it some sort of performance enhancement. Unfortunately, the opposite is true and it is strongly recommended to keep the default setting and keep Node Interleaving disabled.
Node
Interleaving Disabled: NUMA
By using the default
setting of Node Interleaving (disabled), the ACPI “BIOS” will
build a System Resource Allocation Table (SRAT). Within this SRAT,
the physical configuration and CPU memory architecture are described,
i.e. which CPU and memory ranges belong to a single NUMA node. It
proceeds to map the memory of each node into a single sequential
block of memory address space. ESXi uses the SRAT to understand which
memory bank is local to a physical CPU and attempts to allocate local
memory to each vCPU of the virtual machine.
Node
Interleaving Enabled: SUMA
One question that is asked a
lot is how do you turn off NUMA? You can turn off NUMA, but remember
your system is not a transformer, changing your CPUs and memory
layout from a point-to-point-connection architecture to a bus system.
Therefore, when enabling Node Interleaving the system will not become
a traditional UMA system. Part
1 contains a more info on SUMA.
BIOS
setting: ACPI SLIT Preferences
The ACPI System Locality
Information Table (SLIT) provides a matrix that describes the
relative distance (i.e. memory latency) between the proximity
domains. In the past, a large NUMA system the latency from Node 0 to
Node 7 can be much greater than the latency from Node 0 to Node 1,
and this kind of information is provided by the SLIT table.
Modern point-to-point architectures moved from a ring topology to a full mesh topology reducing hop counts, reducing the importance of SLIT. Many server vendor whitepapers describing best practices for VMware ESXi recommend enabling ACPI SLIT. Do not worry if you forgot to enable this setting as ESXi does not use the SLIT. Instead, the ESXi kernel determines the inter-node latencies by probing the nodes at boot-time and use this information for initial placement of wide virtual machines. A wide virtual machine contains more vCPUs than the Core count of a physical CPU, more about wide virtual machines and virtual NUMA can be found in the next article.
Since Sandy Bridge (v1) the CPU system architecture applied by Intel can be described as a System-on-Chip (SoC) architecture, integrating the CPU, GPU, system IO and last level cache into a single package. The QPI and the Uncore are critical components of the memory system and its performance can be impacted by BIOS settings. Available QPI bandwidth depends on the CPU model, therefore it’s of interest to have a proper understanding of the CPU system architecture to design a high performing system.
As mentioned in part 1, the Nehalem microarchitecture introduced a flexible architecture that could be optimized for different segments. In order to facilitate scalability, Intel separated the core processing functionality (ALU, FPU, L1 and L2 cache) from the ‘uncore’ functionality. A nice way to put it is that the Uncore is a collection of components of a CPU that do not carry out core computational functions but are essential for core performance. This architectural system change brought the Northbridge functionality closer to the processing unit, reducing latency while being able to increase the speed due to the removal of serial bus controllers. The Uncore featured the following elements:
|
Uncore element |
Description |
Responsible for: |
|---|---|---|
|
QPI Agent |
QuickPath Interconnect |
QPI caching agent , manages R3QPI and QPI Link Interface |
|
PCU |
Power Controller |
Core/Uncore power unit and thermal manager, governs P-state of the CPU, C-state of the Core and package. It enables Turbo Mode and can throttle cores when a thermal violation occurs |
|
Ubox |
System Config controller |
Intermediary for interrupt traffic between system and core |
|
IIO |
Integrated IO |
Provides the interface to PCIe Devices |
|
R2PCI |
Ring to PCI Interface |
Provides interface to the ring for PCIe access |
|
IMC |
Integrated Memory Controller |
Provides the interface to RAM and communicates with Uncore through home agent |
|
HA |
Integrated Memory Controller |
Provides the interface to RAM and communicates with Uncore through home agent |
|
SMI |
Scalable Memory Interface |
Provides IMC access to DIMMs |
Intel provides a schematic overview of a CPU to understand the relationship between the Uncore and the cores, I’ve recreated this overview to help emphasise certain components. Please note that the following diagram depicts a High Core Count architecture of the Intel Xeon v4 (Broadwell). This is a single CPU package. The cores are spread out in a “chop-able” design, allowing Intel to offer three different core counts, Low, Medium and High. The red line is depicting the scalable on-die ring connecting the cores with the rest of the Uncore components. More in-depth information can be found in part 4 of this series.

If
a CPU core wants to access data it has to communicate with the
Uncore. Data can be in the last-level cache (LLC), thus interfacing
with the Cbox, it might require memory from local memory, interfacing
with the home agent and integrated memory controller (IMC). Or it
needs to fetch memory from a remote NUMA node, as a consequence, the
QPI comes into play. Due to the many components located in the
Uncore, it plays a significant part in the overall power consumption
of the system. With today’s focus on power reduction, the Uncore is
equipped with frequency scaling functionality (UFS).
Haswell (v4) introduces Per Core Power States (PCPS) that allows each core to run at its own frequency. UFS allows the Uncore components to scale their frequency up and down independently of the cores. This allows Turbo Boost 2.0 to turbo up and owns the two elements independently, allowing cores to scale up the frequency of their LLC and ring on-ramp modules, without having to enforce all Uncore elements to turbo boost up and waste power. The feature that regulates boosting of the two elements is called Energy Efficient Turbo, some vendors provide the ability to manage power consumption with the settings Uncore Frequency Override or Uncore Frequency. These settings are geared towards applying performance savings in a more holistic way.
The
Uncore provides access to all interfaces, plus it regulates the power
states of the cores, therefore it has to be functional even when
there is a minimal load on the CPU. To reduce overall CPU power
consumption, the power control mechanism attempts to reduce the CPU
frequency to a minimum by using C1E states on separate cores. If a
C1E state occurs, the frequency of the Uncore is likely to be lowered
as well. This could have a negative effect on the I/O throughput of
the overall throughput of the CPU. To avoid this from happening some
server vendors provide the BIOS option; Uncore Frequency
Override. By default this option is set to Disabled,
allowing the system to reduce the Uncore frequency to obtain power
consumption savings. By selecting Enabled it prevents
frequency scaling of the Uncore, ensuring high performance. To secure
high levels of throughput of the QPI links, select the option
enabled, keep in mind that this can have a negative (increased)
effect on the power consumption of the system.
Some vendors
provide the Uncore Frequency option of Dynamic and Maximum. When set
to Dynamic, the Uncore frequency matches the frequency of the fastest
core. With most server vendors, when selecting the dynamic option,
the optimization of the Uncore frequency is to save power or to
optimize the performance. The bias towards power saving and optimize
performance is influenced by the setting of power-management
policies. When the Uncore frequency option is set to maximum the
frequency remains fixed.
Generally, this modularity should make it more power efficient, however, some IT teams don’t want their system to swing up and down but provide a consistent performance. Especially when the workload is active across multiple nodes in a cluster, running the workload consistently is more important that having a specific node to go as fast as it can.
Virtual machine configuration can impact memory allocation, for example when the memory configuration consumption exceeds the available amount of local memory, ESXi allocates remote memory to this virtual machine. An imbalance of VM activity and VM resource consumption can trigger the ESXi host to rebalance the virtual machines across the NUMA nodes which lead to data migration between the two NUMA nodes. These two examples occur quite frequently, as such the performance of remote memory access, memory migration, and low-level CPU processes such as cache snooping and validation traffic depends on the QPI architecture. It is imperative when designing and configuring a system that attention must be given to the QuickPath Interconnect configuration.
Xeon CPUs designated for dual CPU setup (E5-26xx) is equipped with two QPI bi-directional links. Depending on the CPU model selected, the QPI links operates at high frequencies measured in giga-transfers per second (GT/s). Today the majority of E5 Xeons (v4) operate at 9.6 GT/s, while some run at 6.4 GT/sec or 8.6 GT/sec. Giga-transfer per second refers to the number of operations transferring data that occur in each second in a data-transfer channel. It’s an interesting metric, however, it does not specify the bit rate. In order to calculate the data-transmission rate, the transfer rate must be multiplied by the channel width. The QPI link has the ability to transfer 16 bits of data-payload. The calculation is as follows: GT/s x channel width /bits-to-bytes.
9.6
GT/sec x 16 bits = 153.6 Bits per second / 8 = 19.2 GB/s.
The
purist will argue that this is not a comprehensive calculation, as
this neglects the clock rate of the QPI. The complete calculation
is:
QPI clock rate x bits per Hz x channel width × duplex =
bits ÷ byte. 4.8 Ghz x 2 bits/Hz x 16 x 2 / 8 = 38.4 GB/s.
Haswell (v3) and Broadwell (v4) offer three QPI clock rates, 3.2 GHz, 4.0 GHz, and 4.8 GHz. Intel does not provide clock rate details, it just provide GT/s. Therefore to simplify this calculations, just multiple GT/s by two (16 bits / 8 bits to bytes = 2). Listed as 9.6 GT/s a QPI link can transmit up to 19.2 GB/s from one CPU to another CPU. As it is bidirectional, it can receive the same amount from the other side. In total, the two 9.6 GT/s links provide a theoretical peak data bandwidth of 38.4 GB/sec in one direction.
|
QPI link speed |
Unidirectional peak bandwidth |
Total peak bandwidth |
|---|---|---|
|
6.4 GT/s |
12.8 GB/s |
25.6 GB/s |
|
8.0 GT/s |
16.0 GB/s |
32 GB/s |
|
9.6 GT/s |
19.2 GB/s |
38.4 GB/s |
There is no direct relationship with core-count and QPI link speeds. For example the v4 product family features 3 8-core count CPUs, each with a different QPI link speed, but there are also 10 core CPUs with a bandwidth of 8.0 GT/s. To understand the logic, you need to know that Intel categorizes their CPU product family into segments. Six segments exist; Basic, Standard, Advanced, Segment Optimized, Low Power and Workstation.
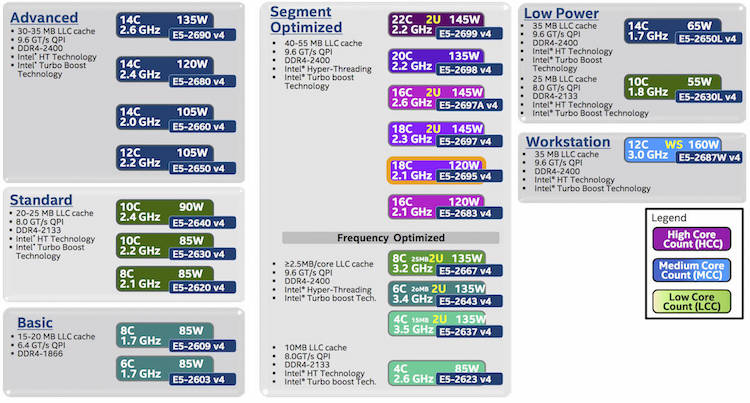
The
Segment Optimized features a sub segment of Frequency Optimized,
these CPU’s push the gigabit boundaries. And then off course there
is the custom-build segment, which is off the list, but if you have
enough money, Intel can look into your problems. The most popular
CPUs used in the virtual datacenter come from the advanced and
segment optimized segments. These CPUs provide enough cores and cache
to drive a healthy consolidation ratio. Primarily the high core count
CPUs from the Segment Optimized category are used. All CPU’s from
these segments are equipped with a QPI link speed of 9.6 GT/s.
|
Segment |
Model Number |
Core count |
Clock cycle |
TDP |
QPI speed |
|---|---|---|---|---|---|
|
Advanced |
E5-2650 v4 |
12 |
2.2 GHz |
105W |
9.6 GT/s |
|
Advanced |
E5-2660 v4 |
14 |
2.0 GHz |
105W |
9.6 GT/s |
|
Advanced |
E5-2680 v4 |
14 |
2.4 GHz |
120W |
9.6 GT/s |
|
Advanced |
E5-2690 v4 |
14 |
2.6 GHz |
135W |
9.6 GT/s |
|
Optimized |
E5-2683 v4 |
16 |
2.1 GHz |
120W |
9.6 GT/s |
|
Optimized |
E5-2695 v4 |
18 |
2.1 GHz |
120W |
9.6 GT/s |
|
Optimized |
E5-2697 v4 |
18 |
2.3 GHz |
145W |
9.6 GT/s |
|
Optimized |
E5-2697A v4 |
16 |
2.6 GHz |
145W |
9.6 GT/s |
|
Optimized |
E5-2698 v4 |
20 |
2.2 GHz |
135W |
9.6 GT/s |
|
Optimized |
E5-2699 v4 |
22 |
2.2 GHz |
145W |
9.6 GT/s |
When opting for a CPU with a lower QPI link speeds, remote memory access will be impacted. During the tests of QPI bandwidth using the Intel Memory Latency Checker v3.1. it reported an average of ˜75% of the theoretical bandwidth when fetching memory from the remote NUMA node.
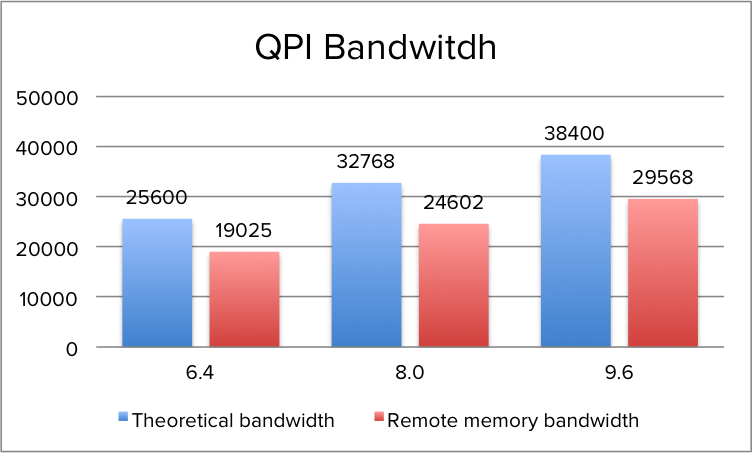
The
peak bandwidth is more a theoretical maximum number as transfer data
comes with protocol overhead. Additionally tracking resources are
needed when using multiple links to track each data request and
maintain coherency. The maximum QPI bandwidth that is available at
the time of writing is lower than the minimum supported memory
frequency of 1600 MHz (Intel Xeon v3 & v4). The peak bandwidth of
DDR4 1600 MHz is 51 GB/s, which exceeds the theoretical bandwidth of
the QPI by 32%. As such, QPI bandwidth can impact remote memory
access performance. In order to obtain the most performance, it’s
recommended to select a CPU with a QPI configuration of 9.6 GT/s to
reduce the bandwidth loss to a minimum, the difference between 9.6
GT/s and 8.0 GT/s configuration is a 29% performance drop. AS QPI
bandwidth impacts remote memory access, it’s the DIMM configuration
and memory frequency that impacts local memory access. Local memory
optimization is covered in Part 4.
Note!
The
reason why I’m exploring nuances of power settings is that
high-performance power consumption settings are not always the most
optimal setting for today’s CPU microarchitecture. Turbo mode
allows cores to burst to a higher clock rate if the power budget
allows it. The finer details of Power management and Turbo mode are
beyond the scope of this NUMA deep dive, but will be covered in the
upcoming CPU Power Management Deep Dive.
Some servers allow you to configure the QPI Link Power Management in the BIOS. When enabled, the buffers in the QPI links are allowed to enter a sleep state when the links are not being used. When there is relatively little traffic, the QPI link shuts down some of its data transmissions lanes, this to achieve power consumption reduction. Within a higher state, it only reduces bandwidth, when entering a deeper state memory access will occur latency impact.
A QPI link consists of a transmit circuit (TX), 20 data lanes, 1 clock lane and a receive circuit (RX). Every element can be progressively switched off. When the QPI is under heavy load it will use all 20 lanes, however when experiencing a workload of 40% or less it can decide to modulate to half width. Half width mode, called L0p state saves power by shutting down at least 10 lanes. The QPI power management spec allows to reduce the lanes to a quarter width, but research has shown that power savings are too small compared to modulating to 10 links. Typically when the 10 links are utilized for 80% to 90% the state shifts from L0p back to the full-width L0 state. L0p allows the system to continue to transmit data without any significant latency penalty. When no data transmit occurs, the system can invoke the L0s state. This state only operates the clock lane and its part of the physical TX and RX circuits, due to the sleep mode of the majority of circuits (lane drivers) within the transceivers no data can be sent. The last state, L1, allows the system to shut down the complete link, benefitting from the highest level of power consumption.
L0s and L1 states are costly from a performance perspective, Intel’s’ patent US 8935578 B2 indicates that exiting L1 state will cost multiple microseconds and L0s tens of nanoseconds. Idle remote memory access latency measured on 2133 MHz memory is on average 130 nanoseconds, adding 20 nanoseconds will add roughly 15% latency and that’s quite a latency penalty. A low power state with longer latency and lower power than L0s and is activated in conjunction with package C-states below C00
|
State |
Description |
Properties |
Lanes |
|---|---|---|---|
|
L0 |
Link Normal Operational State |
All lanes and Forward Clock active |
20 |
|
L0p |
Link power saving state |
A lower power state from L0 that reduces the link from full width to half width |
10 |
|
L0s |
Low Power Link State |
Turns odd most lane drivers, rapid recovery to the L0 state |
1 |
|
L0s |
Deeper Low Power State |
Lane drivers and Fwd clock turned off, greater power savings than L0s, Longer time to return to L0 state |
If the focus is on architecting a consistent high performing platform, I recommend to disable QPI Power Management in the BIOS. Many vendors have switched their default setting from enabled to disabled, nevertheless its wise to verify this setting.
The
memory subsystem and the QPI architecture lay the foundation of the
NUMA architecture. Last level cache is a large part of the memory
subsystem, the QPI architecture provides the interface and bandwidth
between NUMA nodes. It’s the cache coherency mechanisms that play a
great part in providing the ability to span virtual machines across
nodes, but in turn, will impact overall performance and bandwidth
consumption. The
2016 NUMA Deep Dive Series:
Part 0: Introduction
NUMA Deep Dive Series
Part 1: From
UMA to NUMA
Part 2: System
Architecture
Part 3: Cache
Coherency
Part 4: Local
Memory Optimization
Part 5: ESXi
VMkernel NUMA Constructs
Part 6: NUMA Initial Placement and
Load Balancing Operations
Part 7: From NUMA to UMA
![]()