
Frank Denneman is a Chief Technologist in the Office of CTO of the Cloud Platform BU at VMware. He is the author of multiple books including “vSphere 6.5 Host Technical Deep Dive” and the “vSphere Clustering Technical Deep Dive” series.
Non-uniform
memory access (NUMA) is a shared memory architecture used in
today’s multiprocessing systems. Each CPU is assigned its own local
memory and can access memory from other CPUs in the system. Local
memory access provides a low latency – high bandwidth performance.
While accessing memory owned by the other CPU has higher latency and
lower bandwidth performance. Modern applications and operating
systems such as ESXi support NUMA by default, yet to provide the best
performance, virtual machine configuration should be done with the
NUMA architecture in mind. If incorrect designed, inconsequent
behavior or overall performance degradation occurs for that
particular virtual machine or in worst case scenario for all VMs
running on that ESXi host.
This series aims to provide insights
of the CPU architecture, the memory subsystem and the ESXi CPU and
memory scheduler. Allowing you in creating a high performing platform
that lays the foundation for the higher services and increased
consolidating ratios. Before we arrive at modern compute
architectures, it’s helpful to review the history of shared-memory
multiprocessor architectures to understand why we are using NUMA
systems today.
It
seems that an architecture called Uniform Memory Access would be a
better fit when designing a consistent low latency, high bandwidth
platform. Yet modern system architectures will restrict it from being
truly uniform. To understand the reason behind this we need to go
back in history to identify the key drivers of parallel
computing.
With the introduction of relational databases in the
early seventies the need for systems that could service multiple
concurrent user operations and excessive data generation became
mainstream. Despite the impressive rate of uniprocessor performance,
multiprocessor systems were better equipped to handle this workload.
In order to provide a cost-effective system, shared memory address
space became the focus of research. Early on, systems using a
crossbar switch were advocated, however with this design complexity
scaled along with the increase of processors, which made the
bus-based system more attractive. Processors in a bus system are
allowed to access the entire memory space by sending requests on the
bus, a very cost effective way to use the available memory as
optimally as possible.
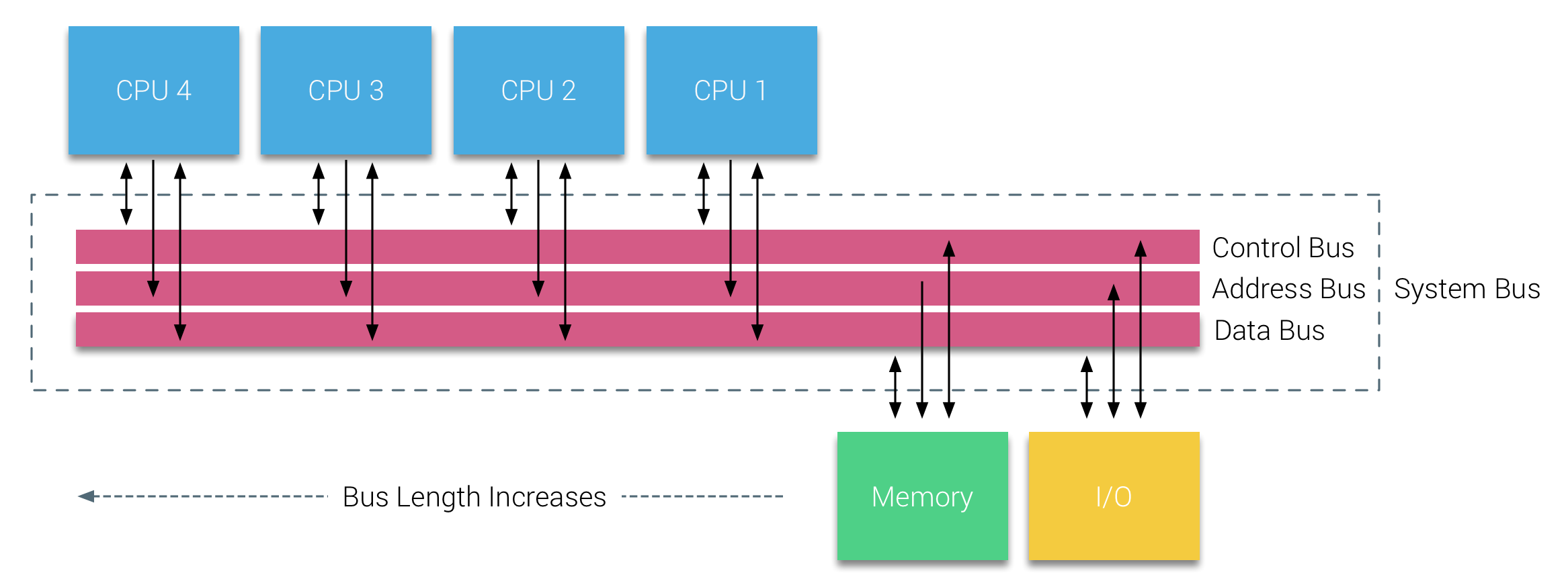
However,
bus-based systems have their own scalability problems. The main issue
is the limited amount of bandwidth, this restrains the number of
processors the bus can accommodate. Adding CPUs to the system
introduces two major areas of concern:
The available bandwidth per node decreases as each CPU added.
The bus length increases when adding more processors, thereby increasing latency.
The performance growth of CPU and specifically the speed gap between the processor and the memory performance was, and actually still is, devastating for multiprocessors. Since the memory gap between processor and memory was expected to increase, a lot of effort went into developing effective strategies to manage the memory systems. One of these strategies was adding memory cache, which introduced a multitude of challenges. Solving these challenges is still the main focus of today for CPU design teams, a lot of research is done on caching structures and sophisticated algorithms to avoid cache misses.
Attaching a cache to each CPU increases performance in many ways. Bringing memory closer to the CPU reduces the average memory access time and at the same time reducing the bandwidth load on the memory bus. The challenge with adding cache to each CPU in a shared memory architecture is that it allows multiple copies of a memory block to exist. This is called the cache-coherency problem. To solve this, caching snoop protocols were invented attempting to create a model that provided the correct data while not trying to eat up all the bandwidth on the bus. The most popular protocol, write invalidate, erases all other copies of data before writing the local cache. Any subsequent read of this data by other processors will detect a cache miss in their local cache and will be serviced from the cache of another CPU containing the most recently modified data. This model saved a lot of bus bandwidth and allowed for Uniform Memory Access systems to emerge in the early 1990s. Modern cache coherency protocols are covered in more detail by part 3.
Processors
of Bus-based multiprocessors that experience the same – uniform –
access time to any memory module in the system are often referred to
as Uniform Memory Access (UMA) systems or Symmetric Multi-Processors
(SMPs).
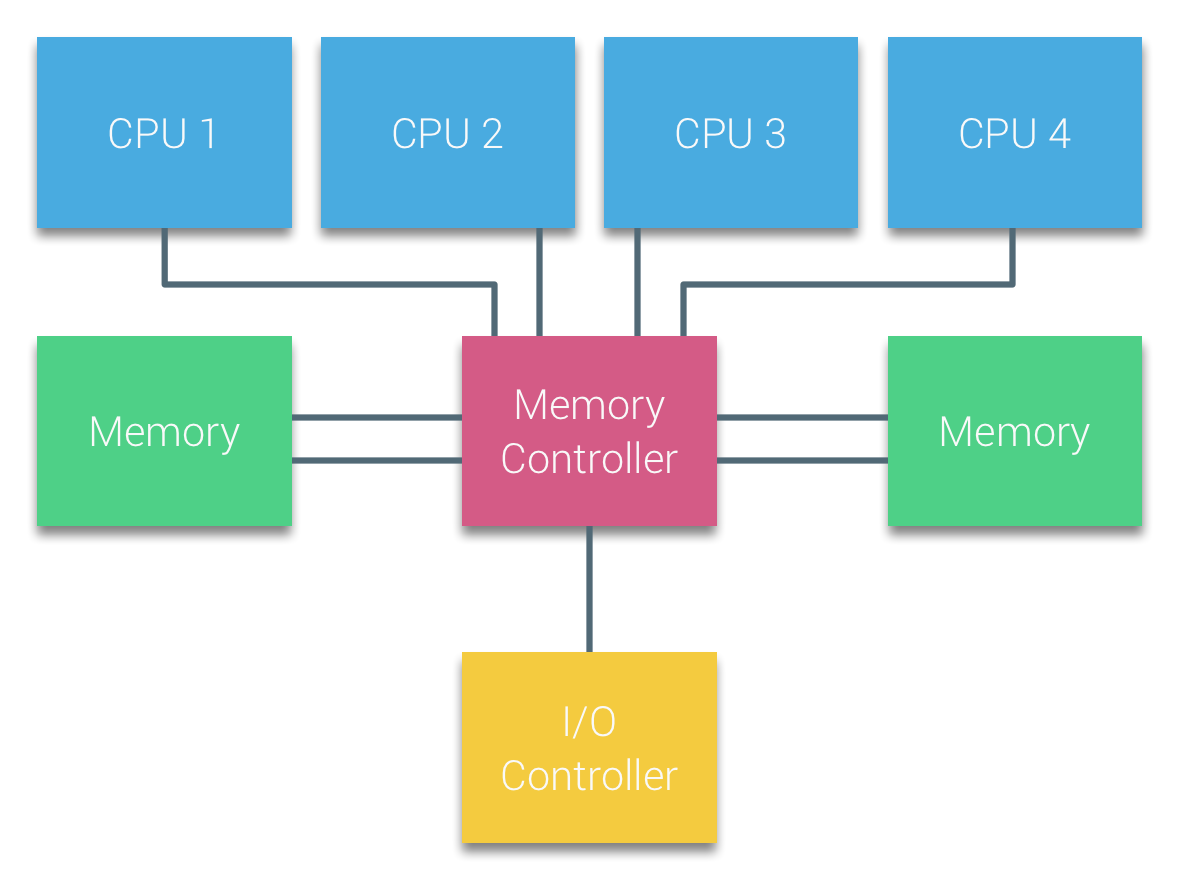
With
UMA systems, the CPUs are connected via a system bus (Front-Side Bus)
to the Northbridge. The Northbridge contains the memory controller
and all communication to and from memory must pass through the
Northbridge. The I/O controller, responsible for managing I/O to all
devices, is connected to the Northbridge. Therefore, every I/O has to
go through the Northbridge to reach the CPU.
Multiple buses and
memory channels are used to double the available bandwidth and reduce
the bottleneck of the Northbridge. To increase the memory bandwidth
even further some systems connected external memory controllers to
the Northbridge, improving bandwidth and support of more memory.
However due the internal bandwidth of the Northbridge and the
broadcasting nature of early snoopy cache protocols, UMA was
considered to have a limited scalability. With today’s use of
high-speed flash devices, pushing hundreds of thousands of IO’s per
second, they were absolutely right that this architecture would not
scale for future workloads.
To improve scalability and performance three critical changes are made to the shared-memory multiprocessors architecture;
Non-Uniform Memory Access organization
Point-to-Point interconnect topology
Scalable cache coherence solutions
NUMA
moves away from a centralized pool of memory and introduces
topological properties. By classifying memory location bases on
signal path length from the processor to the memory, latency and
bandwidth bottlenecks can be avoided. This is done by redesigning the
whole system of processor and chipset. NUMA architectures gained
popularity at the end of the 90’s when it was used on SGI
supercomputers such as the Cray
Origin 2000. NUMA helped to identify the location of the memory,
in this case of these systems, they had to wonder which memory region
in which chassis was holding the memory bits.
In the first half
of the millennium decade, AMD brought NUMA to the enterprise
landscape where UMA systems reigned supreme. In 2003 the AMD Opteron
family was introduced, featuring integrated memory controllers with
each CPU owning designated memory banks. Each CPU has now its own
memory address space. A NUMA optimized operating system such as ESXi
allows workload to consume memory from both memory addresses spaces
while optimizing for local memory access. Let’s use an example of a
two CPU system to clarify the distinction between local and remote
memory access within a single system.
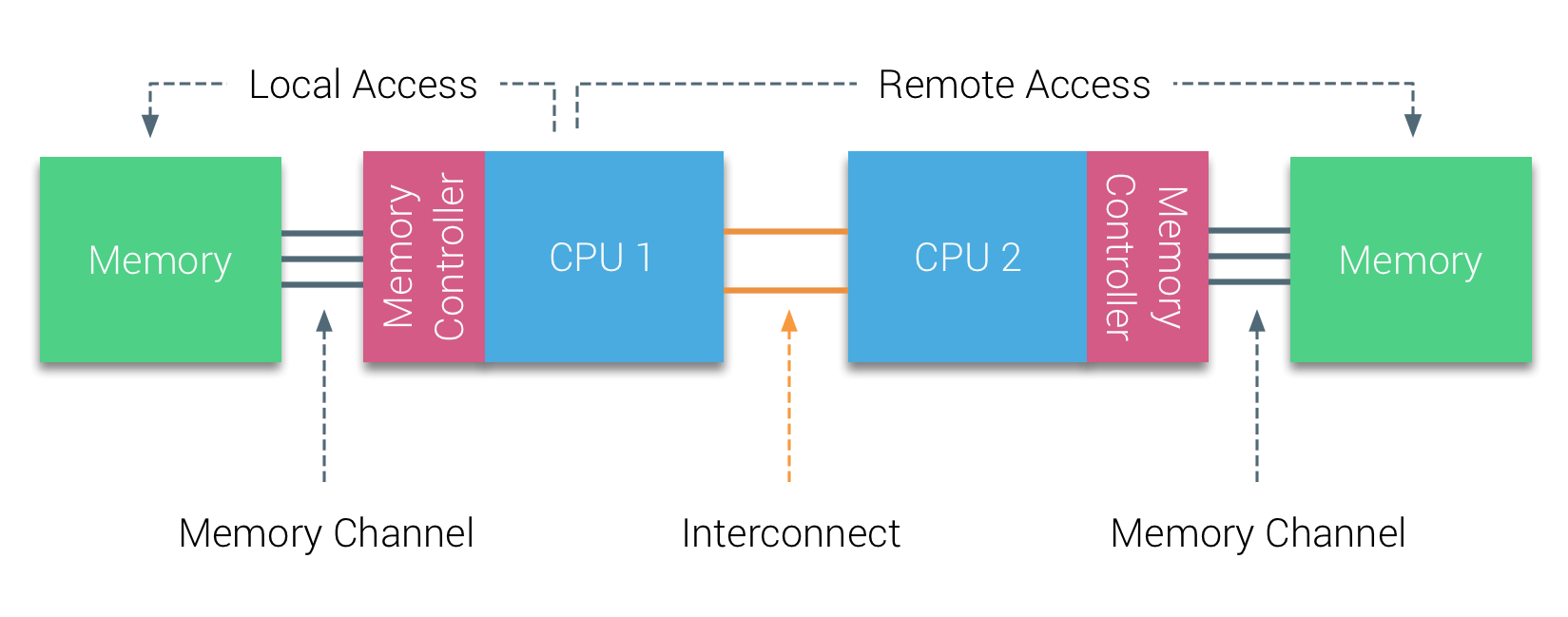
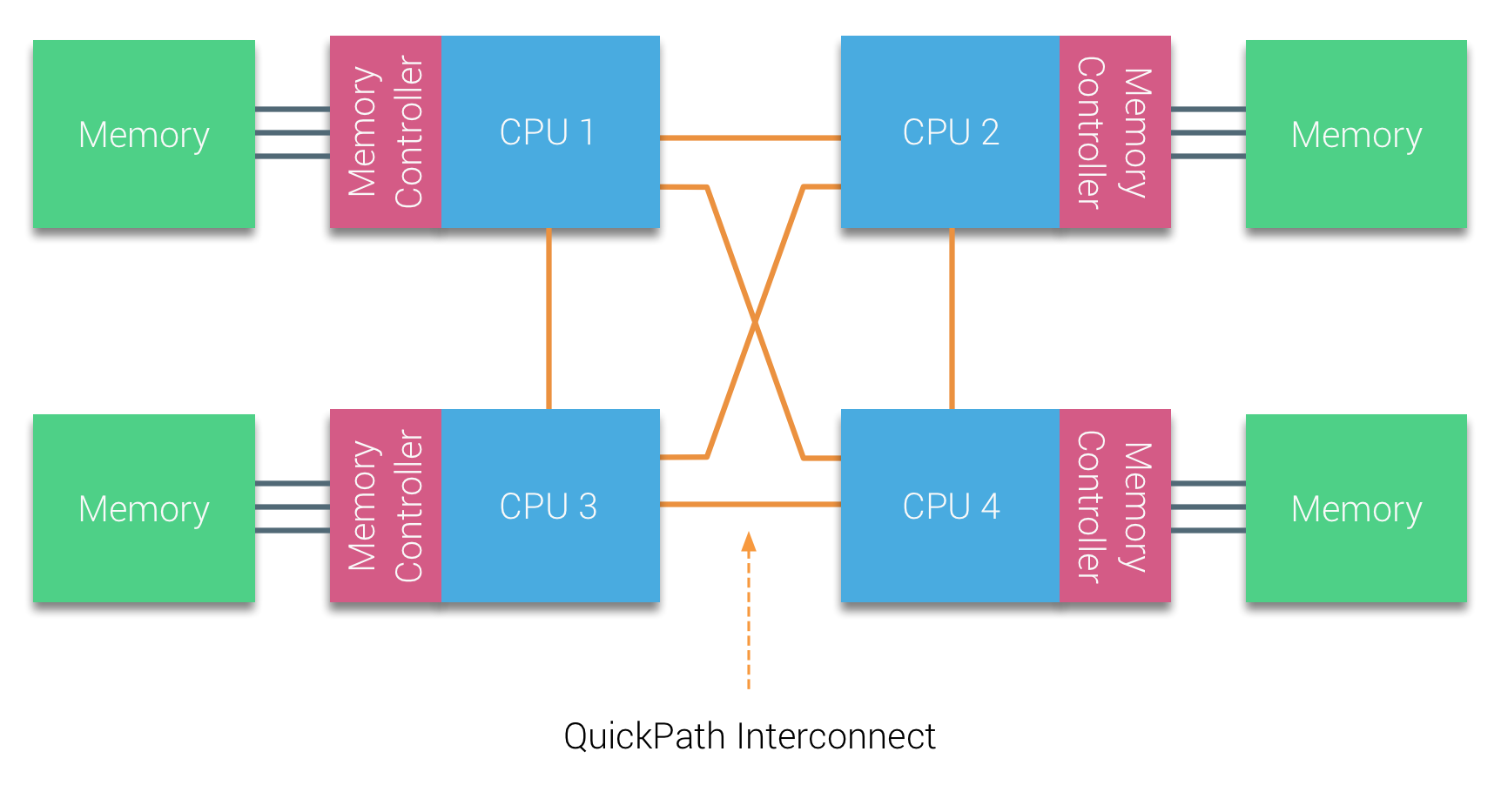
The
memory connected to the memory controller of the CPU1 is considered
to be local memory. Memory connected to another CPU socket (CPU2)is
considered to be foreign or remote for CPU1. Remote memory access has
additional latency overhead to local memory access, as it has to
traverse an interconnect (point-to-point link) and connect to the
remote memory controller. As a result of the different memory
locations, this system experiences “non-uniform” memory access
time.
AMD
introduced their point-to-point connection HyperTransport with the
AMD
Opteron microarchitecture. Intel moved away from their dual
independent bus architecture in 2007 by introducing the QuickPath
Architecture in their Nehalem Processor family design.
The
Nehalem
architecture was a significant design change within the Intel
microarchitecture and is considered the first true generation of the
Intel Core series. The current Broadwell architecture is the 4th
generation of the Intel Core brand (Intel Xeon E5 v4), the last
paragraph contains more information on the microarchitecture
generations. Within the QuickPath architecture, the memory
controllers moved to the CPU and introduced the QuickPath
point-to-point Interconnect (QPI) as data-links between CPUs in the
system.
The
Nehalem microarchitecture not only replaced the legacy front-side bus
but reorganized the entire sub-system into a modular design for
server CPU. This modular design was introduced as the “Uncore”
and creates a building block library for caching and interconnect
speeds. Removing the front-side bus improves bandwidth scalability
issues, yet intra- and inter-processor communication have to be
solved when dealing with enormous amounts of memory capacity and
bandwidth. Both the integrated memory controller and the QuickPath
Interconnects are a part of the Uncore and are Model Specific
Registers (MSR) ). They connect to a MSR that provides the intra- and
inter-processor communication. The modularity of the Uncore also
allows Intel to offer different QPI speeds, at the time of writing
the Intel Broadwell-EP microarchitecture (2016) offers 6.4
Giga-transfers per second (GT/s), 8.0 GT/s and 9.6 GT/s. Respectively
providing a theoretical maximum bandwidth of 25.6 GB/s, 32 GB/s and
38.4 GB/s between the CPUs. To put this in perspective, the last used
front-side bus provided 1.6 GT/s or 12.8 GB/s of platform bandwidth.
When introducing Sandy Bridge Intel rebranded Uncore into System
Agent, yet the term Uncore is still used in current documentation.
You can find more about QuickPath and the Uncore in part 2.
Each
core had a private path to the L3 cache. Each path consisted of a
thousand wires and you can imagine this doesn’t scale well if you
want to decrease the nanometer manufacturing process while also
increasing the cores that want to access the cache. In order to be
able to scale, the Sandy Bridge Architecture moved the L3 cache out
of the Uncore and introduced the scalable ring on-die Interconnect.
This allowed Intel to partition and distribute the L3 cache in equal
slices. This provides higher bandwidth and associativity. Each slice
is 2.5 MB and one slice is associated with each core. The ring allows
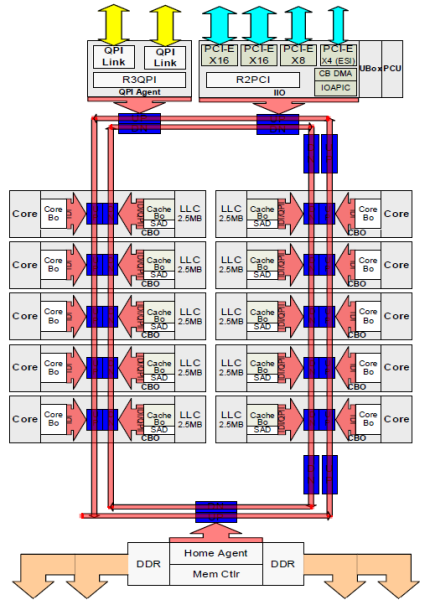
each core to access every other slice as well. Pictured below is the
die configuration of a Low Core Count (LCC) Xeon CPU of the Broadwell
Microarchitecture (v4) (2016).
This
caching architecture requires a snooping protocol that incorporates
both distributed local cache as well as the other processors in the
system to ensure cache coherency. With the addition of more cores in
the system, the amount of snoop traffic grows, since each core has
its own steady stream of cache misses. This affects the consumption
of the QPI links and last level caches, requiring ongoing development
in snoop coherency protocols. An in-depth view of the Uncore,
scalable ring on-Die Interconnect and the importance of caching snoop
protocols on NUMA performance will be included in part 3.
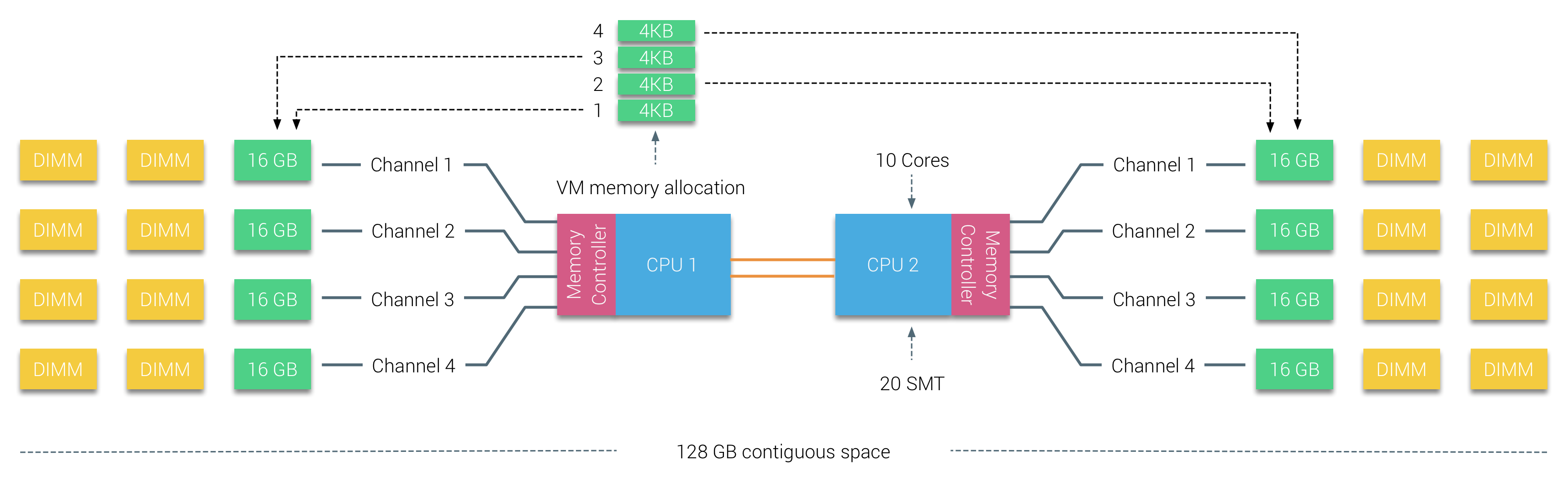
Physical
memory is distributed across the motherboard, however, the system can
provide a single memory address space by interleaving the memory
between the two NUMA nodes. This is called Node-interleaving (setting
is covered in part 2). When node interleaving is enabled, the system
becomes a Sufficiently Uniform Memory Architecture (SUMA). Instead of
relaying the topology info and nature of the processors and memory in
the system to the operating system, the system breaks down the entire
memory range into 4KB addressable regions and maps them in a round
robin fashion from each node. This provides an ‘interleaved’
memory structure where the memory address space is distributed across
the nodes. When ESXi assigns memory to virtual machine it allocates
physical memory located from two different nodes when the physical
CPU located in Node 0 needs to fetch the memory from Node 1, the
memory will traverse the QPI links.
The
interesting thing is that the SUMA system provides a uniform memory
access time. Only not the most optimal one and heavily depends on
contention levels in the QPI architecture. Intel
Memory Latency Checker was used to demonstrate the differences
between NUMA and SUMA configuration on the same
system.
This test measures the idle latencies (in
nanoseconds) from each socket to the other socket in the system. The
latency reported of Memory Node 0 by Socket 0 is local memory access,
memory access from socket 0 of memory node 1 is remote memory access
in the system configured as NUMA.
|
NUMA |
Memory Node 0 |
Memory Node 1 |
– |
SUMA |
Memory Node 0 |
Memory Node 1 |
|
Socket 0 |
75.7 |
132.0 |
– |
Socket 0 |
105.5 |
106.4 |
|
Socket 1 |
131.9 |
75.8 |
– |
Socket 1 |
106.0 |
104.6 |
As expected interleaving is impacted by constant traversing the QPI links. The idle memory test is the best case scenario, a more interesting test is measuring loaded latencies. It would have been a bad investment if your ESXi servers are idling, therefor you can assume that an ESXi system is processing data. Measuring loaded latencies provides a better insight on how the system will perform under normal load. During the test the load injection delays are automatically changed every 2 seconds and both the bandwidth and the corresponding latency is measured at that level. This test uses 100% read traffic.NUMA test results on the left, SUMA test results on the right.
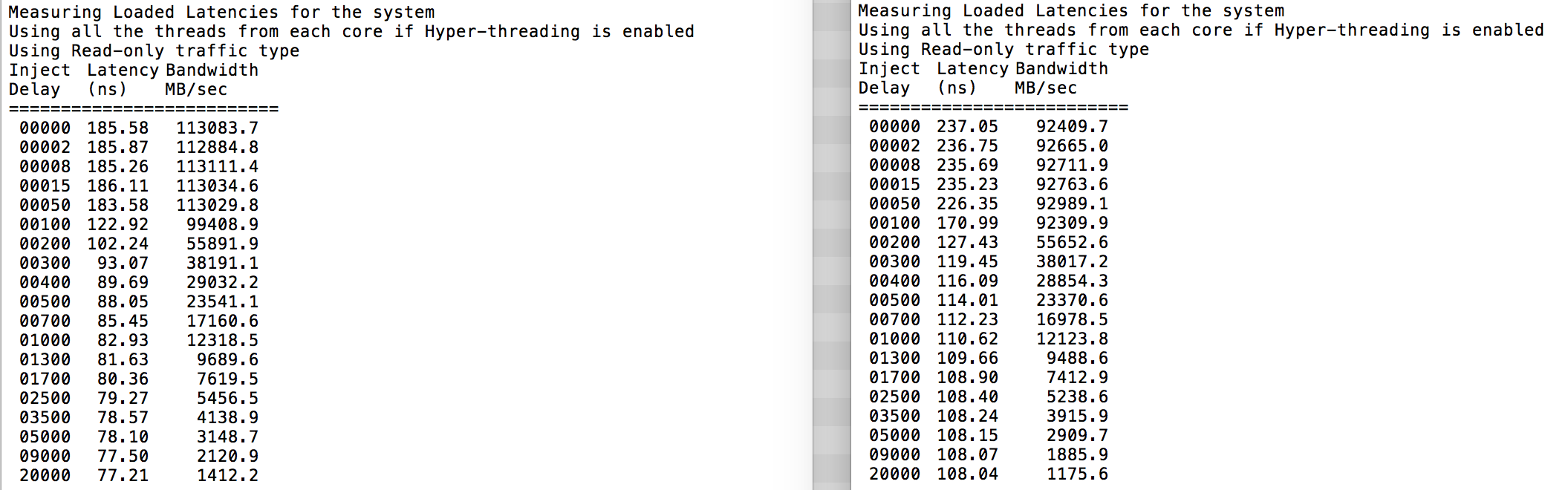
The
reported bandwidth for the SUMA system is lower while maintaining a
higher latency than the system configured as NUMA. Therefore, the
focus should be on optimizing the VM size to leverage the NUMA
characteristics of the system.
With the introduction of the Nehalem microarchitecture in 2008, Intel moved away from the Netburst architecture. The Nehalem microarchitecture introduced Intel customers to NUMA. Along the years Intel introduced new microarchitectures and optimizations, according to its famous Tick-Tock model. With every Tick, optimization takes place, shrinking the process technology and with every Tock a new microarchitecture is introduced. Even though Intel provides a consistent branding model since 2012, people tend to Intel architecture codenames to discuss the CPU tick and tock generations. Even the EVC baselines lists these internal Intel codenames, both branding names and architecture codenames will be used throughout this series:
|
Microarchitecture DP servers |
Branding |
Year |
Cores |
LLC (MB) |
QPI Speed (GT/s) |
Memory Frequency |
Architectural change |
Fabrication Process |
|
Nehalem |
x55xx |
10-2008 |
4 |
8 |
6.4 |
3xDDR3-1333 |
Tock |
45nm |
|
Westmere |
x56xx |
01-2010 |
6 |
12 |
6.4 |
3xDDR3-1333 |
Tick |
32nm |
|
Sandy Bridge |
E5-26xx v1 |
03-2012 |
8 |
20 |
8.0 |
4xDDR3-1600 |
Tock |
32nm |
|
Ivy Bridge |
E5-26xx v2 |
09-2013 |
12 |
30 |
8.0 |
4xDDR3-1866 |
Tick |
22 nm |
|
Haswell |
E5-26xx v3 |
09-2014 |
18 |
45 |
9.6 |
4xDDR3-2133 |
Tock |
22nm |
|
Broadwell |
E5-26xx v4 |
03-2016 |
22 |
55 |
9.6 |
4xDDR3-2400 |
Tick |
14 nm |
The
2016 NUMA Deep Dive Series:
Part 0: Introduction
NUMA Deep Dive Series
Part 1: From
UMA to NUMA
Part 2: System
Architecture
Part 3: Cache
Coherency
Part 4: Local
Memory Optimization
Part 5: ESXi
VMkernel NUMA Constructs
Part 6: NUMA Initial Placement and
Load Balancing Operations
Part 7: From NUMA to UMA